子空间分析与跟踪(3) —— 子空间方法
- 一些基础概念及符号表示
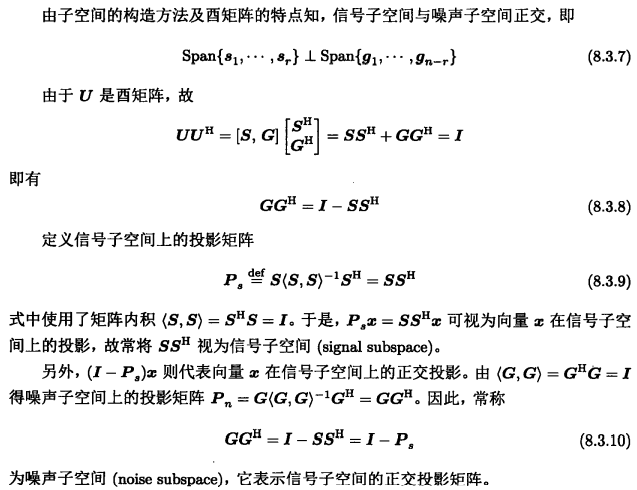
- 信号子空间与噪声子空间
- 主分量分析(principal component analysis, PCA)和次分量分析(minor component analysis, MCA)
- 子空间应用的几个特点
一些基础概念及符号表示
在工程应用中,多数情况下使用列空间。
观测数据矩阵$A$不可避免地存在观测误差或噪声。令
\[X=A+W={x_1,x_2,...,x_n}\in\mathcal{C}^{m\times n}\]为观测数据矩阵,其中$x_i\in\mathcal{C}^{m\times 1}$为观测数据向量,而$W$表示加性观测误差矩阵。
在信号处理和系统科学等领域中,
- 观测数据矩阵的列空间称为观测数据空间:
- 观测误差矩阵的列空间称为噪声子空间:
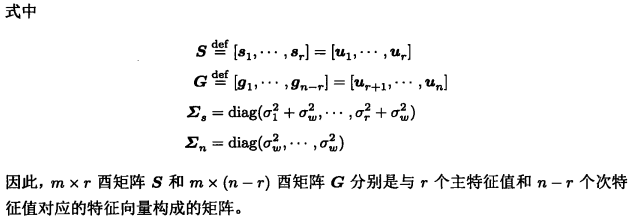
信号子空间与噪声子空间
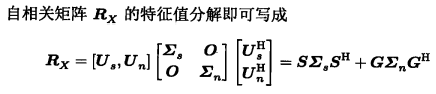
- 相关矩阵
如果假设误差矩阵与真实数据矩阵$A$统计不相关,上式可以进一步化简得到
\[\begin{aligned} R_X&=E\{X^HX\}=E\{(A+W)^H(A+W)\}\\&=E\{A^HA\}+E\{W^HW\} \end{aligned}\]如果满足下列条件
\[R=E\{A^HA\},E\{W^HW\}=\sigma_w^2I,rank(A)=r\]则有
\[\begin{aligned} R_X&=R+\sigma_w^2I=U\Lambda U^H+\sigma_w^2I\\&=U(\Lambda+\sigma_w^2I)U^H=U\Pi U^H \end{aligned}\]其中
\[\Sigma=diag(\sigma_1^2,...,\sigma_r^2,0,...,0)\\ \Pi=\Lambda+\sigma_w^2I=diag(\sigma_1^2+\sigma_w^2,...,\sigma_r^2+\sigma_w^2,\sigma_w^2,...,\sigma_w^2)\]且 $\sigma_1^2\ge\sigma_2^2\ge…\ge\sigma_r^2$
如果信噪比足够大($\sigma_r^2$»$\sigma_w^2$),那么
- 主特征值(principal eigenvalue):含噪声的自相关矩阵$R_X$的前r个大特征值
- 次特征值(minor eigenvalue):除了主特征值以外的$n-r$个小特征值

信号子空间和噪声子空间的几何意义
主分量分析(principal component analysis, PCA)和次分量分析(minor component analysis, MCA)

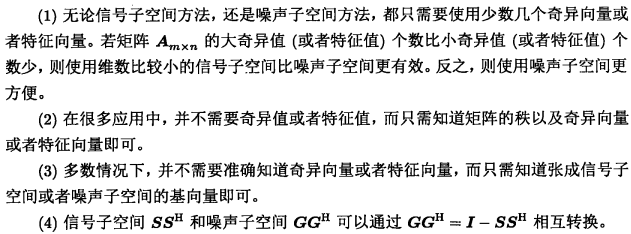
子空间应用的几个特点
[1] 张贤达. (2004). 矩阵分析与应用. 清华大学出版社有限公司.